


Mechanical Design
Experimental Lane Keeping Assist for an Autonomous Vehicle Based on Optimal PID Controller
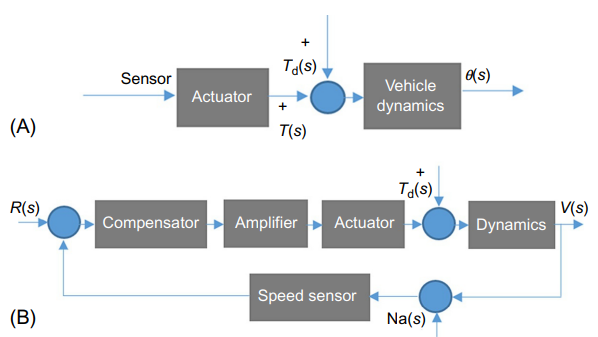
Detection of the lane boundary is the primary task in order to control the trajectory of an autonomous car. In this paper, three methodologies for lane detection are discussed with experimental illustration: Blob analysis, Hough transformation and Birds eye view. The next task after receiving the boundary points is to apply a control law in order to trigger the steering and velocity control to the motors efficiently. In the following, a comparative analysis is made between different tuning criteria to tune PID controller for Lane Keeping Assist (LKA). In order to receive the information of the
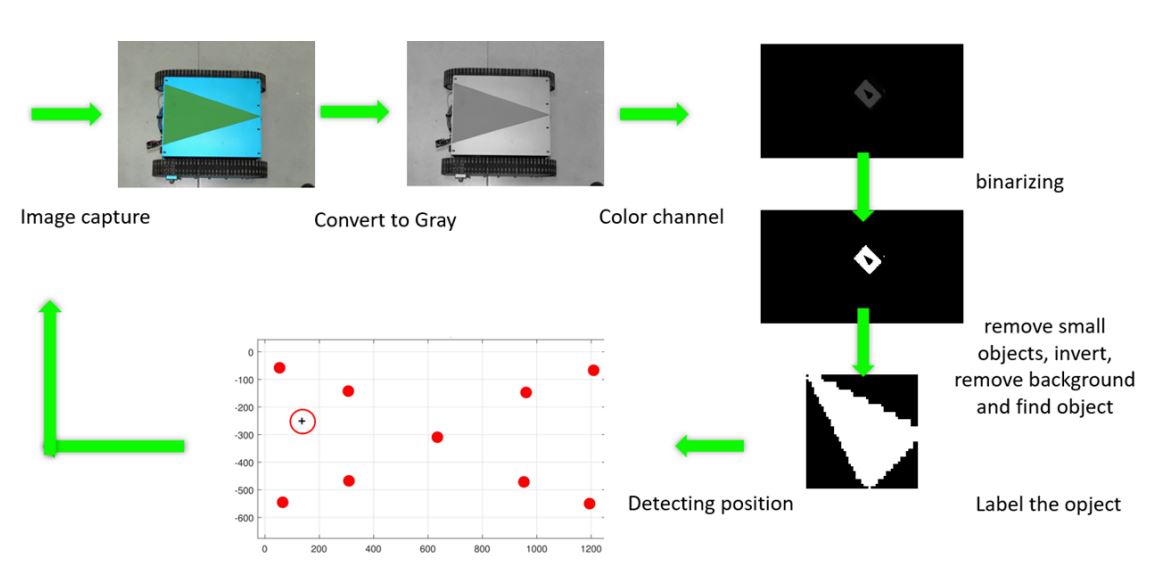
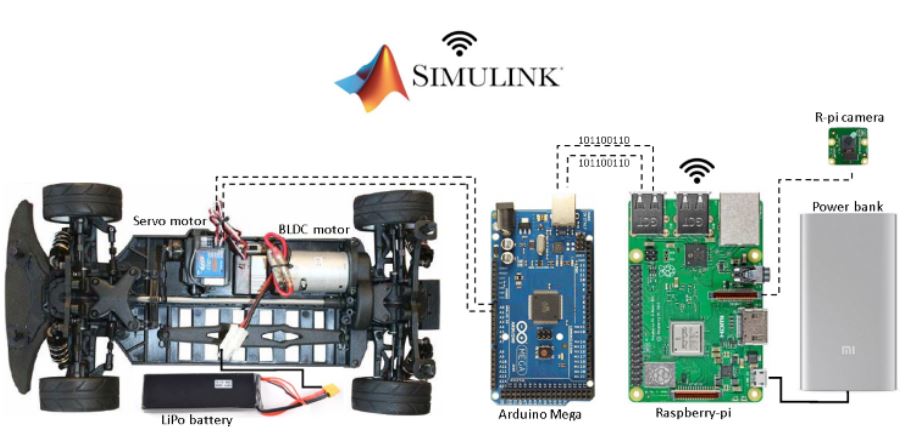
Experimental Path tracking optimization and control of a nonlinear skid steering tracked mobile robot
The skid steering tracked robot is consider one of the famous robots that used in the autonomous agricultural field. The robot model is considered as a coupled nonlinear model. So, a real kinematic model is required to develop the robot motion which will improve the high quality and quantity of the cultivated crops. So, in this research a mathematical model for the skid steering mobile robot (SSMR) and a mathamtical model has been presented to simulate the robot. The model has been validated based on experimental data for the Skid Steering model. The robot motion as position and velocity has
Numerical investigation of hematocrit variation effect on blood flow in an arterial segment with variable stenosis degree
Numerical simulations of blood flow in arteries are important in the understanding and diagnosis of many cardiovascular diseases, such as atherosclerosis and arterial stenosis. More realistic mathematical models representing blood rheology offer a better understanding of these diseases. In this study, blood is considered an Oldroyd-B fluid with a shear-thinning property and a shear rate-dependent relaxation time that is adopted by fitting experimental data. The Quemada model is used to represent the shear-thinning property with hematocrit variation. The stabilized finite element method is used
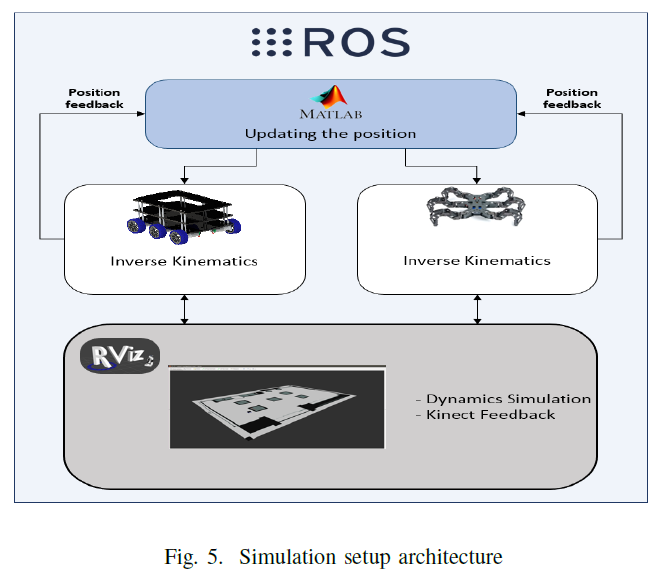
Centralized Multi-agent Mobile Robots SLAM and Navigation for COVID-19 Field Hospitals
In this paper we focus on the proof of concept prototype of fully autonomous centralized Multi-Robot System (MRS) consisting of a Hexapod walking robot and a six wheeled mobile robot. Recently, there has been an increasing demand for such systems as they can be involved in several tasks such as collaborative search and rescue, surveillance, monitoring, and disinfecting Field hospitals. To name a few, COVID-19 pandemic showed the weak points in the medical sector around the world, including those in the most advanced nations that had to go through hard decisions due to the lack of medical
Ergonomic analysis of a working posture in steel industry in Egypt using digital human modeling
This study presents solutions for improving a bending awkward posture in steel industry in Egypt using digital Human Modeling (DHM). The information is gathered by interviewing the workers, working postures are recorded via a video camera while the worker is performing his usual work. The postures are analyzed using DHM software. Porter comfort analysis and Rapid Upper Limb Assessment are applied for postures analysis. The analysis shows high levels of discomfort in neck, trunk, leg and forearm. These discomforts could cause permanent injuries over long periods. A modified design is proposed
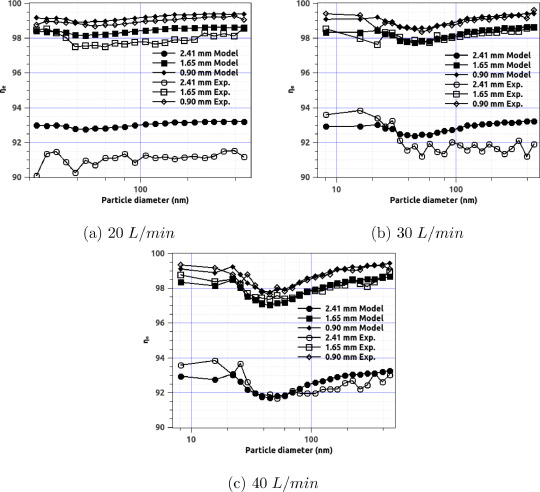
An analytical model for the effective filtration efficiency of single and multiple face masks considering leakage
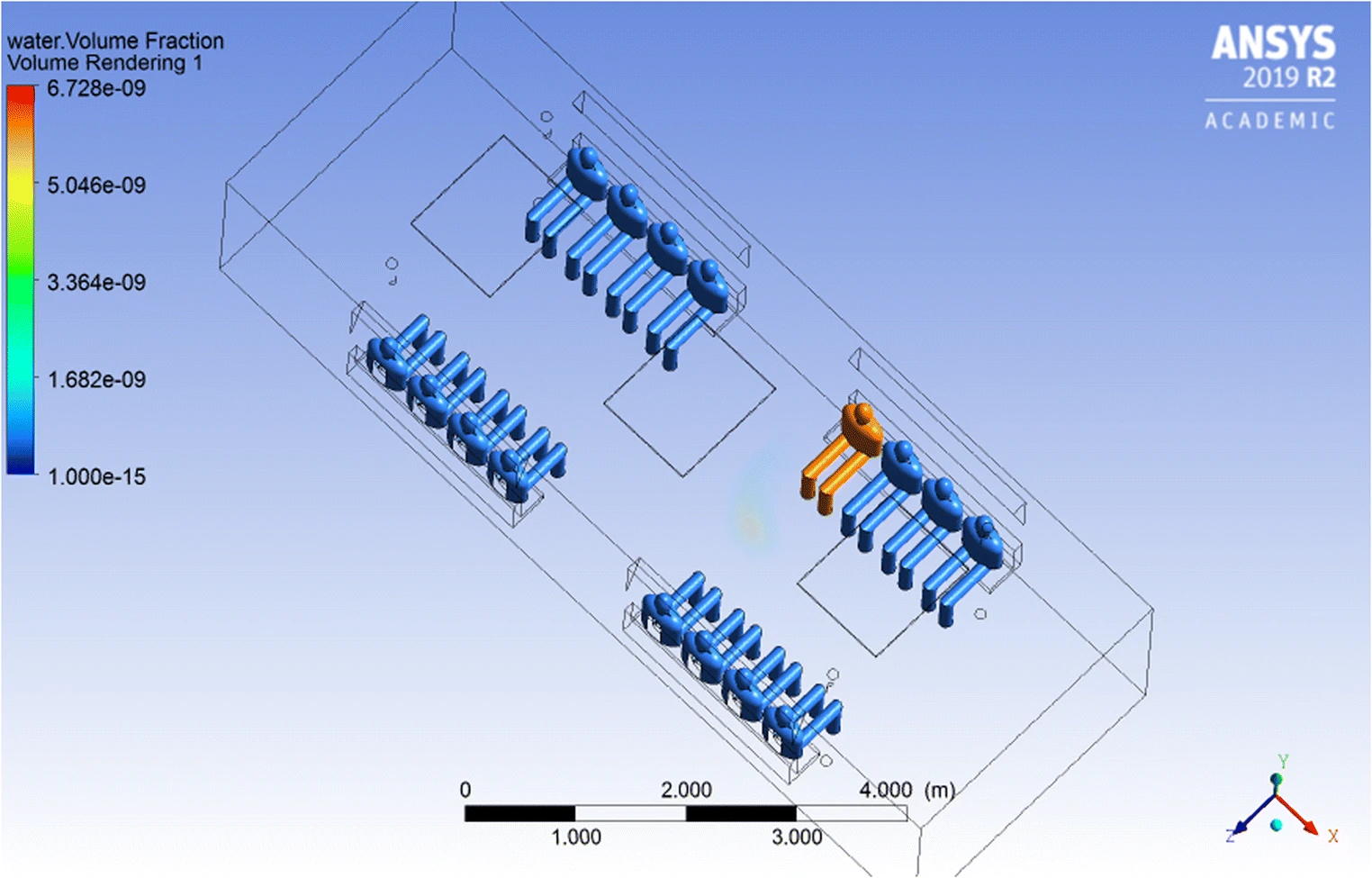
Air change rate effects on the airborne diseases spreading in Underground Metro wagons
Simulation of vitiligo therapy equipment
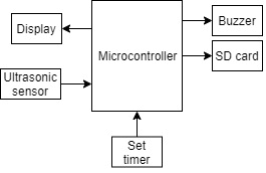
Vitiligo is a skin disorder caused by a lack of melanin pigment in the skin, which causes white patches on certain parts of the skin because this melanin pigment is not able to produce the skin color. Previously, one of the treatments for vitiligo was using a UVB lamp with a 311 nm wavelength that could not yet be adjusted to dim the lights as safety when conducting therapy. Therefore, the research aims to design a simulation of the vitiligo therapy device equipped with a timer LED lamp, a safety of lighting, and the data storage. The data are stored in the SD Card to make it easier for
Medical nanorobots: Design, applications and future challenges
Following the current technological revolution, the concept of emerging fields and getting a common benefit becomes a bright way to follow. Going deeper in nanotechnology, nanorobotics has been the glimpse of hope in many fields; particularly, in the medical field. Nanorobotics applications in medicine are divided into two main categories, diagnosis and treatment, and extensive efforts have been given to research about its operation principles and design. Unfortunately, problem have emerged regarding the implementation, methods of actuation, and customized components of nanorobotics to be used
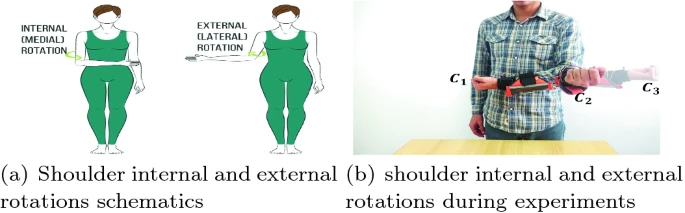
Classifying Upper Limb Activities Using Deep Neural Networks
This paper presents a classification method using Inertial Measurement Unit (IMU) in order to classify six human upper limb activities. The study was also carried out to investigate whether theses activities are being performed normally or abnormally using two different neural networks: Artificial neural network (ANN) and convolutional neural network (CNN). Human activities that were included in the study: arm flexion and extension, arm pronation and supination, shoulder internal and external rotations. Before activities categorization, training data was obtained by the means of an IMU sensor