


Artificial Intelligence
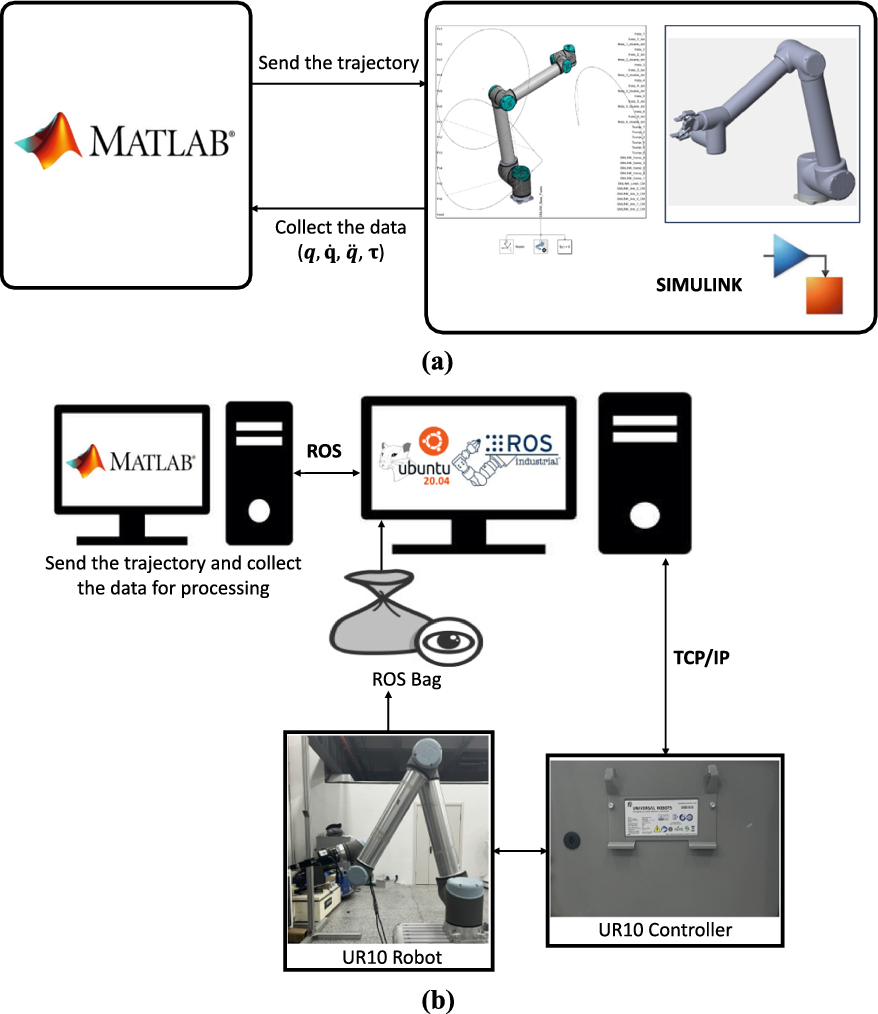
Robust data-driven dynamic model discovery of industrial robots with spatial manipulation capability using simple trajectory
Industrial standard model-based controllers need an accurate dynamic model to perform reliably. The classical technique for dynamics modeling of industrial robots relies on deriving the closed-form dynamic equations and then identifying the inertial parameters on the assumption that all the kinematic and geometric details of the robot are known. This study extends the recently developed data-driven SINDy method to obtain the dynamic model of industrial robots with spatial manipulation capabilities. The proposed method is applied to the 6-DOF UR10 robot in simulated and experimental

Numerical simulation of viscoelastic blood flow with hematocrit variation in an arterial segment with two aneurysms
In this study, a viscoelastic model with variable viscosity and relaxation-time is proposed for the simulation of the blood flow in an arterial segment with two aneurysms. The Quemada model is adopted to model both the shear rate-dependent viscosity and hematocrit variation. Available experimental data for the shear rate-dependent relaxation-time of the blood, in a certain range, are fitted and used. The arterial segment with aneurysms is considered as a rigid axisymmetric thin tube with two balloon expansions. The stabilised finite element method with the discrete elastic viscous stress
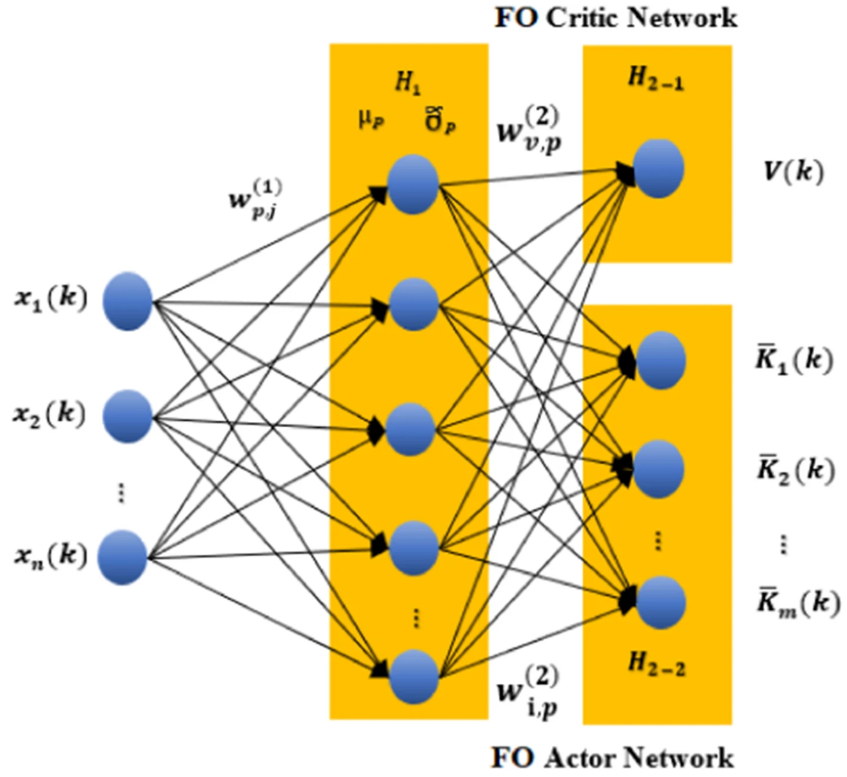
Optimal fractional-order PID controller based on fractional-order actor-critic algorithm
In this paper, an online optimization approach of a fractional-order PID controller based on a fractional-order actor-critic algorithm (FOPID-FOAC) is proposed. The proposed FOPID-FOAC scheme exploits the advantages of the FOPID controller and FOAC approaches to improve the performance of nonlinear systems. The proposed FOAC is built by developing a FO-based learning approach for the actor-critic neural network with adaptive learning rates. Moreover, a FO rectified linear unit (RLU) is introduced to enable the AC neural network to define and optimize its own activation function. By the means
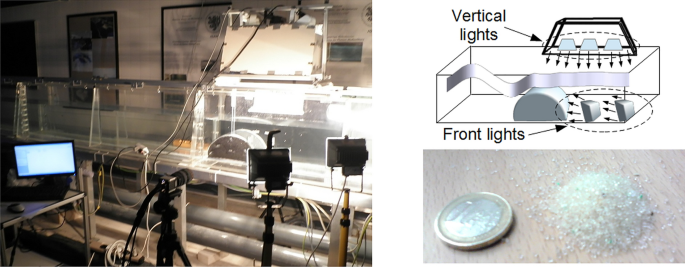
Numerical simulation and PIV measurements of the wave-induced flow field near semi-circular breakwaters
Abstract: Careful design of the high-tech semi-circular breakwaters (SBW), which are used for protection against sea waves, is essential to avoid the failure of these large-scale projects. An improved design tool adopting numerical simulations, complemented with experimental measurements is introduced. Unstructured boundary-fitted grids are used to model the curved SBW boundary accurately and resolve the flow adjacent to it. Experimental measurements based on Particle Image Velocimetry (PIV) are introduced and the numerically simulated velocity fields are validated. For the first time, the

Influence of magnetically-induced nonlinear added stiffness on the lift galloping of square cylinders at low Reynolds number
A square cylinder may gallop if subjected to fluid flow, experiencing a self-excited vibration mode that can harvest energy for low-power applications. The harvested power is typically low and depends on the upstream flow velocity and system dynamic parameters. In this study, the influence of nonlinear stiffness induced by two repulsive magnetic poles on the galloping response of square rods is investigated at a mass ratio of 10 and a Reynolds number of 200. The vibration response of two identical coaxial square rods with magnetic poles attached to their opposite ends is analyzed. Two
Physics-Constrained Data-Driven Dynamic Modeling of Underactuated Robotic Systems
Underactuated robots are intriguing systems that have found numerous applications across various fields. These systems are characterized by having fewer actuators than degrees of freedom, resulting in complex behaviors that challenge traditional modeling and control techniques. Despite the prevalent use of data-driven modeling, extracting the dynamic model of underactuated systems is particularly challenging. This paper focuses on deriving from data the dynamic model of the Double Inverted Pendulum on a Cart (DIPC). The Euler-Lagrange equations are employed to derive the model's terms from the
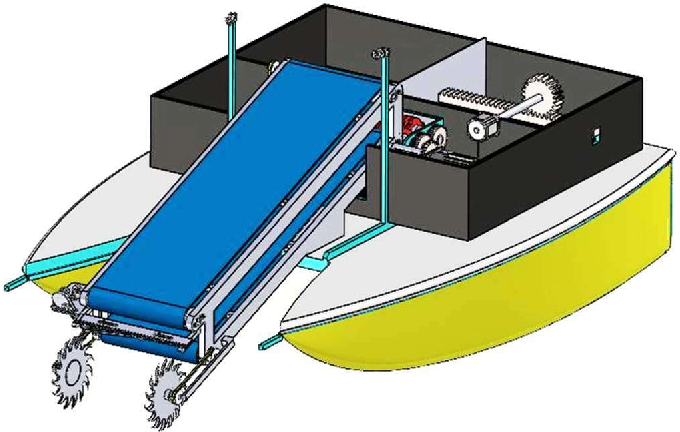
Developing a Floating Robot for Mechanical Control of Water Hyacinth
Water hyacinth has become widespread in freshwater bodies in several countries, leading to various issues, particularly its substantial water consumption and the resulting need to control its growth. Among the different methods of controlling water hyacinth, mechanical control stands out as the most effective and environmentally friendly approach. A proposed harvester robot has been developed, capable of efficiently cutting and collecting water hyacinth from the water's surface. The robot boasts several advantages, including its ability to operate in narrow water paths and lakes, use clean
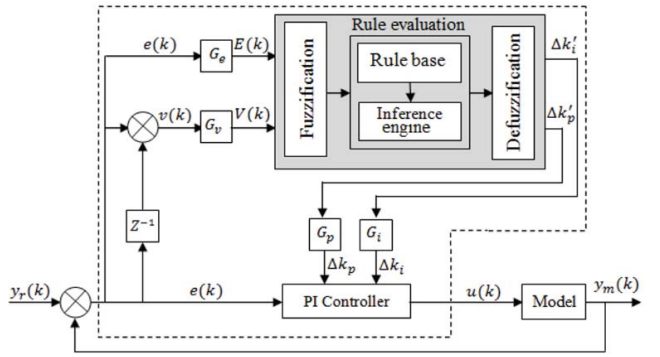
Fuzzy-supervised pi for flow-control process, design and experimental validation
This paper is dedicated to design a fuzzy-supervised PI controller. It is a is a two-level controller, the lower-level controller (LLC) containing the classical PI controller and the upper-level controller (ULC) is a supervisory fuzzy logic controller (FLC). In real time, the ULC modifies, automatically, the parameters of the LLC which, consequently, drive the process to the desired status. The performance of the proposed controller is, primarily, examined by simulating it in MATLAB. Then, it is experimentally validated and compared to the classical PI-control through two test phases, the
Shock System Dynamics of a Morphing Bump Over a Flat Plate
The shock wave boundary layer interaction (SW-BLI) phenomenon over transonic and supersonic airfoils captured the attention of aerospace engineers, due to its disastrous effect on the aerodynamic performance of these vehicles. Thus, the scientific community numerically and experimentally investigated several active and passive flow control elements to reduce the effect of the phenomenon, such as vortex generator, cavity, and bump. They focused on designing and optimizing the shape and location of the bump control element. However, the transit movement of the bump from the state of a clean
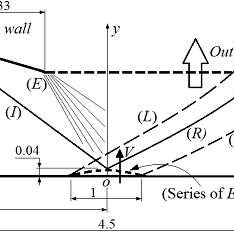
Unsteady Supersonic Flow over a 2-D Morphing Shock Control Bump Using Different Velocity Profiles
Starting with the simple geometry of a flat plate to study the transient phase of the morphing Shock Control Bump (SCB), this paper presents the results of the second phase of our investigation. The SCB is morphed with different velocity profiles at the optimal morphing time from our previous study. Five motion profiles are tested to morph the SCB, namely; linearmotion, parabolic motion, half-parabolic motion, reversed parabolic motion, and half-reversed parabolic motion. The aim of this paper is to numerically determine the suitable velocity profile that minimizes the entropy losses, the lag