


Software and Communications
Deep Learning Based Kinematic Modeling of 3-RRR Parallel Manipulator
This paper presents a novel low cost design for a 3-RRR Planar Parallel Manipulator (PPM). These manipulators proved their superiority over serial manipulators due to their speed, precision and smaller work space where the work space area is accounted for in the design to ensure that the robot is performing its task in a smooth and simple way without getting into any singularity points. The challenge with PPM is to obtain the kinematic constraint equations of the manipulator due to their complex non-linear behavior. Screw theory is a new approach that is used to compute the direct and inverse
Optimized PID and NN-based Speed Control of a Load-coupled DC Motor
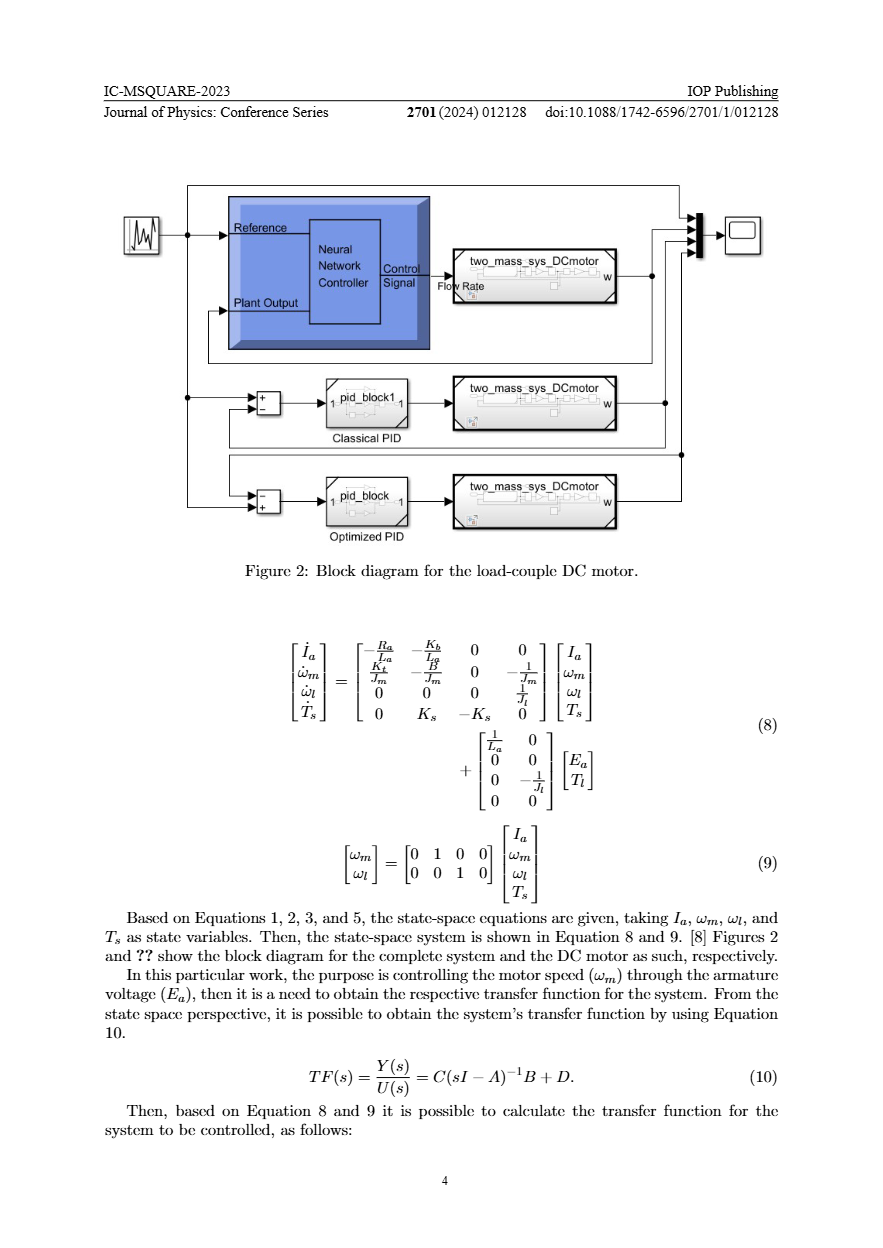
In this work, three control strategies are presented, compared, and discussed, applied on a load-coupled DC motor. The purpose is to control in an optimal way the motor speed in terms of the armature voltage. Two strategies are based on PID control, working on the classical PID controller and the optimized one by using particle swarm optimization (PSO) to tune the PID controller parameters. The other strategy is based on neural networks (NNs) where two NNs are built to model and control the system. Based on the results, all the strategies reach excellent performances, however, in terms of
KNN and the CNN for Handwritten Digit Recognition: A comparative study
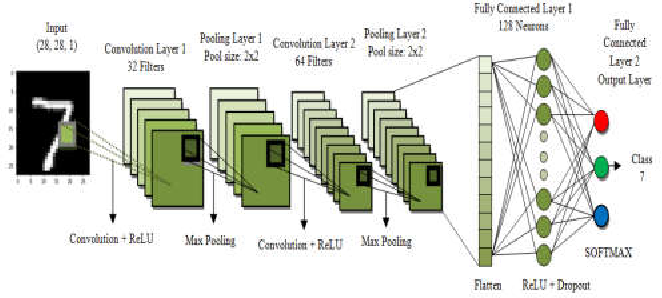
The automatic identification of handwritten digits by computers or other devices is referred to as "handwritten digit recognition technology,"and it has a wider range of potential applications in the processing of bank bills, financial statements, and postage stamps. This study examines the methods KNN, and CNN, and their use in handwritten digit recognition using samples from the MNIST handwritten digit database. In order to achieve the best results for each method, this work rewrites KNN with Python and CNN with Tensorflow throughout the training phase. The benefits and drawbacks of the two
Fractional-order fuzzy sliding mode control of uncertain nonlinear MIMO systems using fractional-order reinforcement learning
This paper introduces a novel approach aimed at enhancing the control performance of a specific class of unknown multiple-input and multiple-output nonlinear systems. The proposed method involves the utilization of a fractional-order fuzzy sliding mode controller, which is implemented through online fractional-order reinforcement learning (FOFSMC-FRL). First, the proposed approach leverages two Takagi–Sugeno–Kang (TSK) fuzzy neural network actors. These actors approximate both the equivalent and switch control parts of the sliding mode control. Additionally, a critic TSK fuzzy neural network
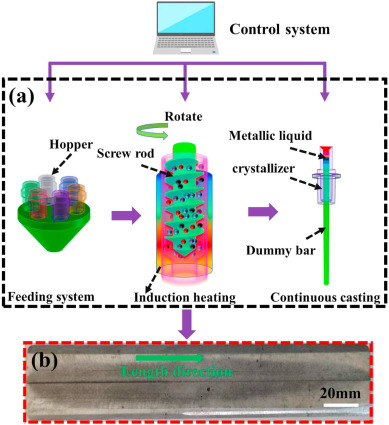
Investigation on microstructures, mechanical properties, and corrosion behavior of novel biodegradable Zn-xCu-xTi alloys after hot rolling fabricated by self-developed newly gradient continuous casting
The poor mechanical properties exhibited by pure Zn effectively prohibit its utilization as a viable material for biodegradable implants. Hence, the primary area of interest has been directed towards alloy design and process strategies of biodegradable Zn alloys. To this end, novel biodegradable Zn-xCu-xTi (Cu: x = 0.001–2.72 and Ti: x = 0.03–1.21) alloys were designed and fabricated using a gradient continuous casting method followed by homogenization and rolling. The fabricated samples were then investigated in terms of their microstructures, mechanical properties, and corrosion behavior
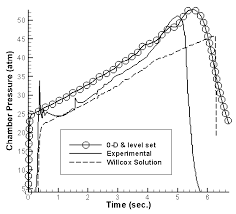
Solid rocket motor interior ballistics fluid-solid interaction simulation using level set method for 2D grains
The flow inside a solid rocket motor is considered taking into account the fluid-solid interaction between the combustion gases and the burning grain surface. An unsteady flow model is presented for the flow variables while the time-dependent burning surface is captured using the level set method. Then, a hybrid model is presented by coupling the flow model with the interface capturing technique. The proposed hybrid model is successfully tested against previously published experimental and numerical data. The use of the level set method enables the flow model to consider complex grain shapes
Numerical Investigation for a Two-Dimensional Moving Flapping Wing
The aerodynamic performance of a moving flapping wing is investigated numerically using a fluid–solid interaction model. The flow field is assumed to be two-dimensional, viscous, unsteady, and incompressible. Galerkin-least/squares finite element method is used to account for the convective nature of the flow field. The flow solver is coupled with the rigid body equations of motion describing the movement of the flapping wing. An interface-capturing technique is developed and tailored to the present model to capture the flapping wing during its movement. The developed algorithm is validated

A Framework for Data Driven Dynamic Modeling of Serial Manipulators
Robot dynamic modeling and parameter identification are essential for many analyses. High-fidelity multi-body dynamics simulators can model the robot's dynamic behavior, but they can't identify the robot's non-linear dynamic model needed for controller design. This study proposes a three-step machine-learning framework for extracting the dynamic equations of serial manipulators from data. This framework consists of three steps. Initially, a library of candidate functions is constructed, together with a data set based on the robot's unforced response. Secondly, the best models that can
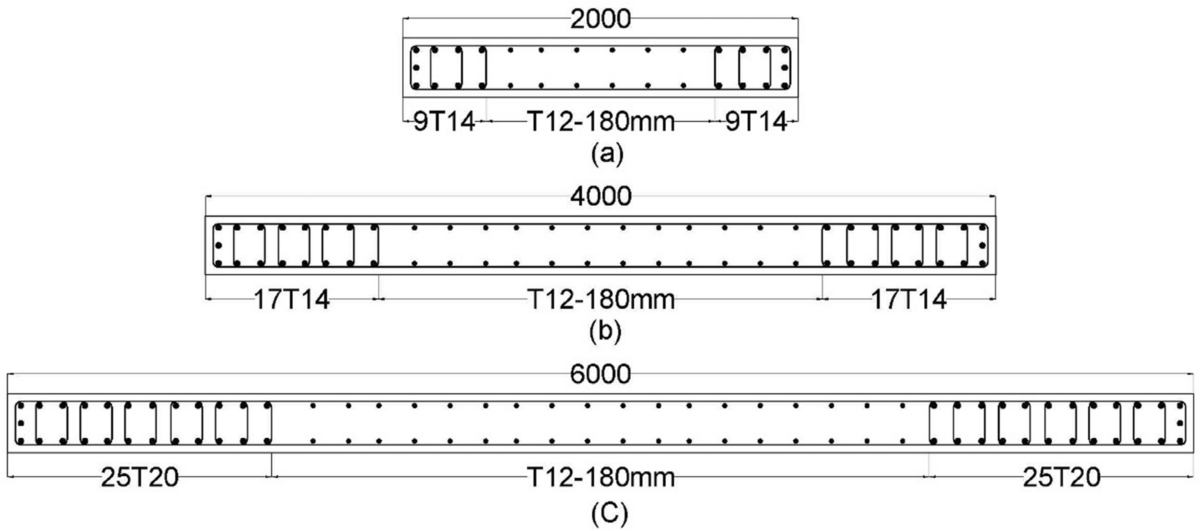
Estimation of Corrosion-Free Reinforcement as Replacement to Steel Rebars for Concrete Walls
Reinforced concrete (RC) walls are commonly used in various structures to resist lateral forces. In the current paper, hybrid usage of stainless steel (SS) and glass fiber-reinforced polymer (GFRP) as an alternative of steel rebars, which is susceptible to corrosion, is proposed to improve durability of RC walls. Due to the high cost of SS compared to GFRP, SS rebars are utilized as concentrated reinforcement (RFT) in plastic hinge regions while GFRP rebars are used elsewhere. This combination has the advantage of providing adequate ductility and strength needed to resist both gravity and
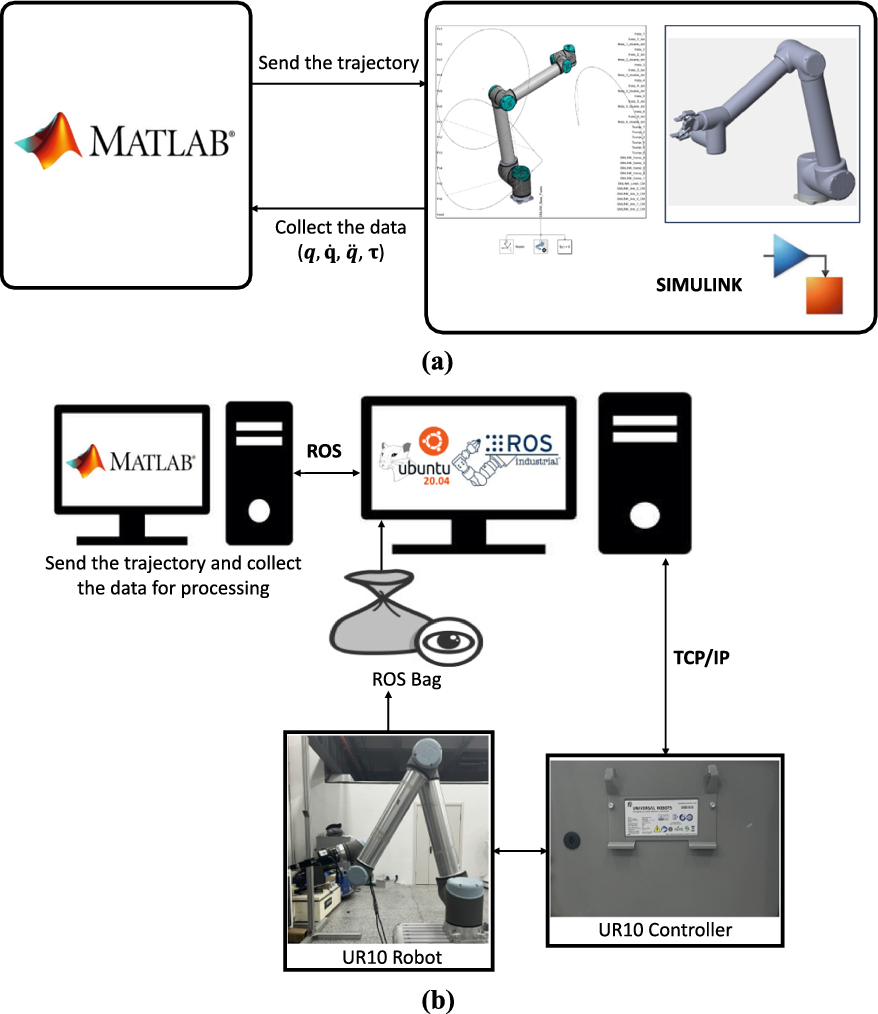
Robust data-driven dynamic model discovery of industrial robots with spatial manipulation capability using simple trajectory
Industrial standard model-based controllers need an accurate dynamic model to perform reliably. The classical technique for dynamics modeling of industrial robots relies on deriving the closed-form dynamic equations and then identifying the inertial parameters on the assumption that all the kinematic and geometric details of the robot are known. This study extends the recently developed data-driven SINDy method to obtain the dynamic model of industrial robots with spatial manipulation capabilities. The proposed method is applied to the 6-DOF UR10 robot in simulated and experimental