Trajectory Planning for Safety-Critical Driving Scenarios based on Dynamic Programming
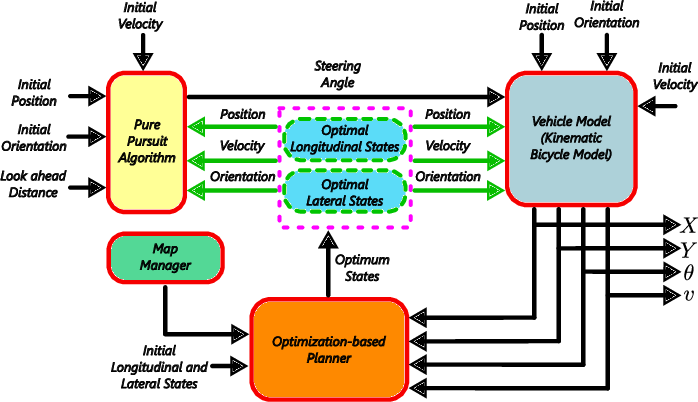
Autonomous Vehicles (AVs) are critical, and nowadays are essential technology that transfers traditional transportation systems into smart, and driverless ones. Considering the available processed data and information that came from localization, perception, and HD map, AVs could exceed the limit of the efficiency and safety of those conventional systems. AVs could use enhanced techniques and algorithms to execute safety-critical scenarios in dynamic environments that have static and dynamic obstacles, traffic signs,..., etc. This paper aims to propose a novel motion planning algorithm that guarantees the safety of the AV in such complex scenarios. This algorithm is based on the extracted data from the HD map and the constrained nonlinear dynamic programming technique. The constraints will be extracted and fed to the optimizer which oversees generating the optimal safe control points within the safe search space. A simple car model is being used for the equations of motion for the AV. Moreover, this formulation guarantees that the entire trajectory is constrained and safe. Finally, the planning safe trajectory problem is simulated. Moreover, this formulation guarantees that the entire trajectory is constrained and safe. Finally, the planning safe trajectory problem is being simulated. © 2023 IEEE.
Related Publications
Hands-on analysis of using large language models for the auto evaluation of programming assignments