


Publications
Publications
Filter by
Analytical solution for nonlinear interaction of euler beam resting on a tensionless soil
The nonlinear interaction between an elastic Euler beam and a tensionless soil foundation is studied. Exact analytical solutions of the challenging problem are rather complicated. The basic obstacle is imposing compatibility conditions at lift-off points. These points are determined as a part of the solution although being needed to get the solution itself. In the current work, solutions are

Experimental investigation of the dynamic characteristics of wrapped and wound fiber and metal/fiber reinforced composite pipes
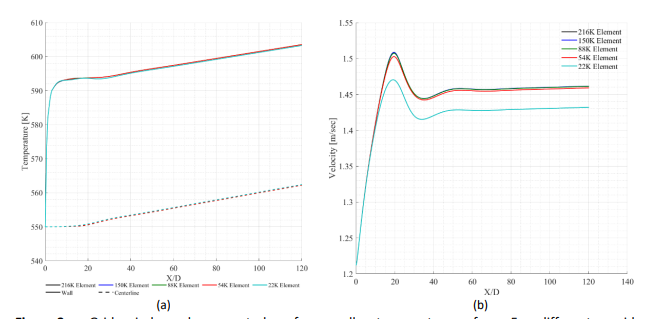
Turbulent Axisymmetric Non-Isothermal Flow of the Hitec Molten Salt with Temperature Dependent Properties: A Numerical Investigation
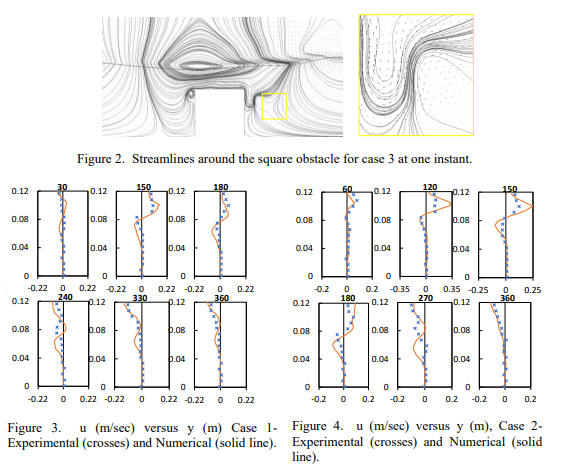
Modeling complex flow induced by water waves propagation over submerged square obstacles
Submerged breakwaters are efficient structures used for shore protection. Many design features of these structures are captured upon modeling wave propagation over submerged square obstacles. The presence of separation vortices and large free surface deformations complicates the problem. A multiphase turbulent numerical model is developed using ANSYS commercial package. Careful domain
Power-law compensator design for plants with uncertainties: Experimental verification
A power-law compensator scheme for achieving robust frequency compensation in control systems including plants with an uncertain pole, is introduced in this work. This is achieved through an appropriate selection of the compensator parameters, which guarantee that the Nyquist diagram of the open-loop system compensator-plant crosses a fixed point independent of the plant pole variations. The
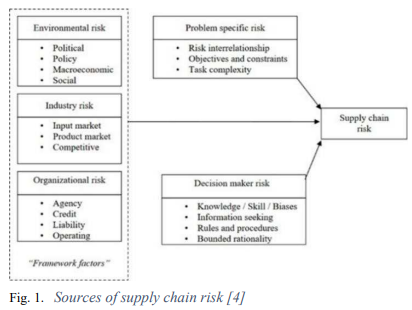
Supply Chain Risk Assessment Using Fuzzy Logic
Business's strength arises from the strength of its supply chain. Therefore, a proper supply chain management is vital for business continuity. One of the most challenging parts of SCM is the contract negotiation, and one main aspect of the negotiation is to know the risk associated with each range of quantity agreed on. Currently Managers assess the quantity to be supplied based on a binary way
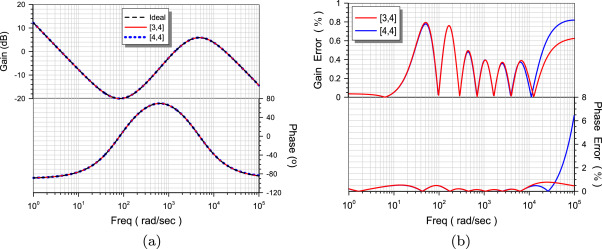
Realizations of fractional-order PID loop-shaping controller for mechatronic applications
A novel procedure for the realization of a fractional-order PID loop-shaping controller, suitable for precision control of mechatronic systems, is introduced in this work. Exploiting appropriate tools, the controller function is approximated as a whole, leading to a simple form of integer-order approximation, when compared to the case where each intermediate part of the PID transfer function is
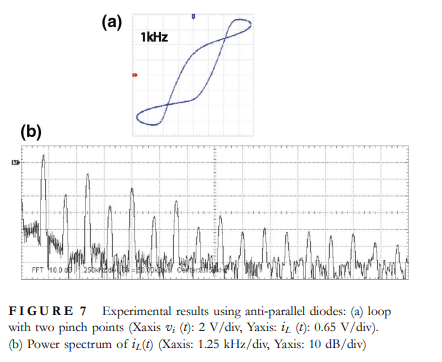
Pinched hysteresis loops in non-linear resonators
This study shows that pinched hysteresis can be observed in simple non-linear resonance circuits containing a single diode that behaves as a voltage-controlled switch. Mathematical models are derived and numerically validated for both series and parallel resonator circuits. The lobe area of the pinched loop is found to increase with increased frequency and multiple pinch points are possible with
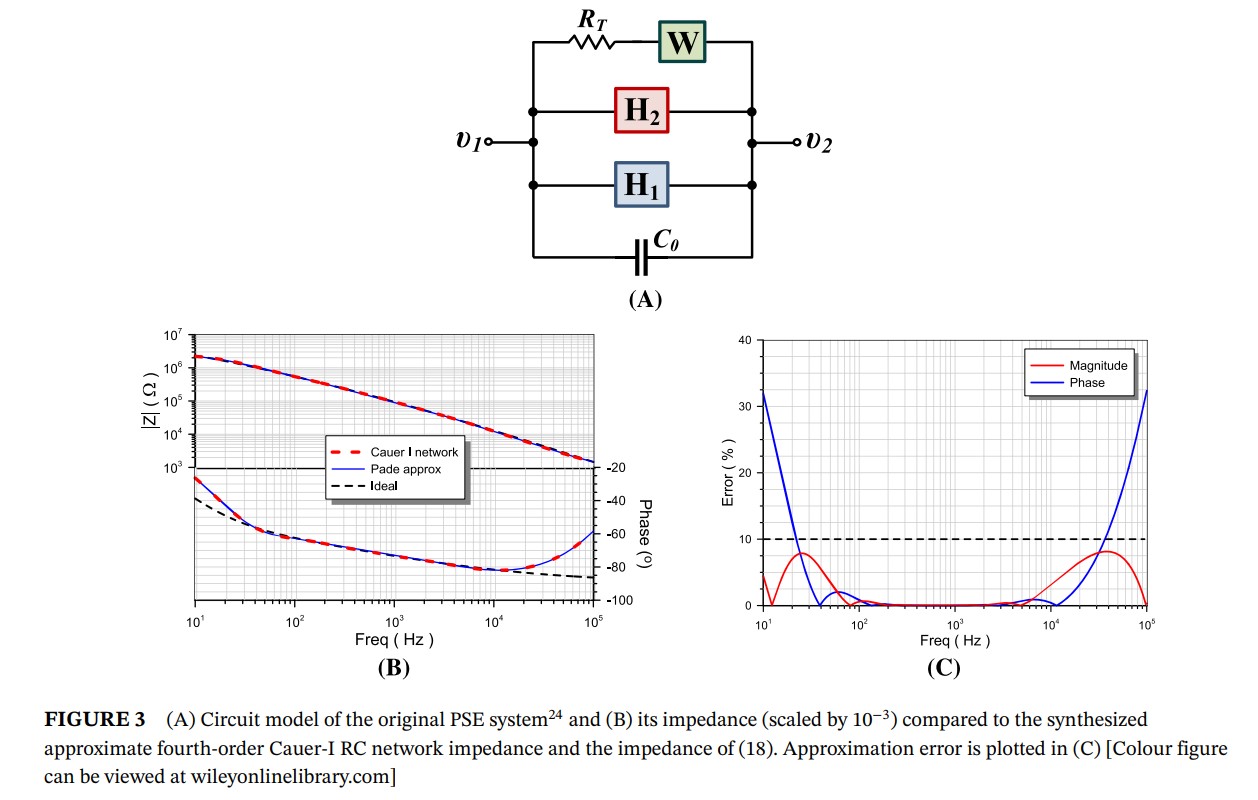
Passive approximations of double-exponent fractional-order impedance functions
Double-exponent fractional-order impedance functions are important for modeling a wide range of biochemical materials and biological tissues. Through appropriate selection of the two exponents (fractional orders), the well-known Havriliak–Negami, Cole–Cole, Cole–Davidson, and Debye relaxation models can be obtained as special cases. Here we show that an integer-order Padé-based approximation of
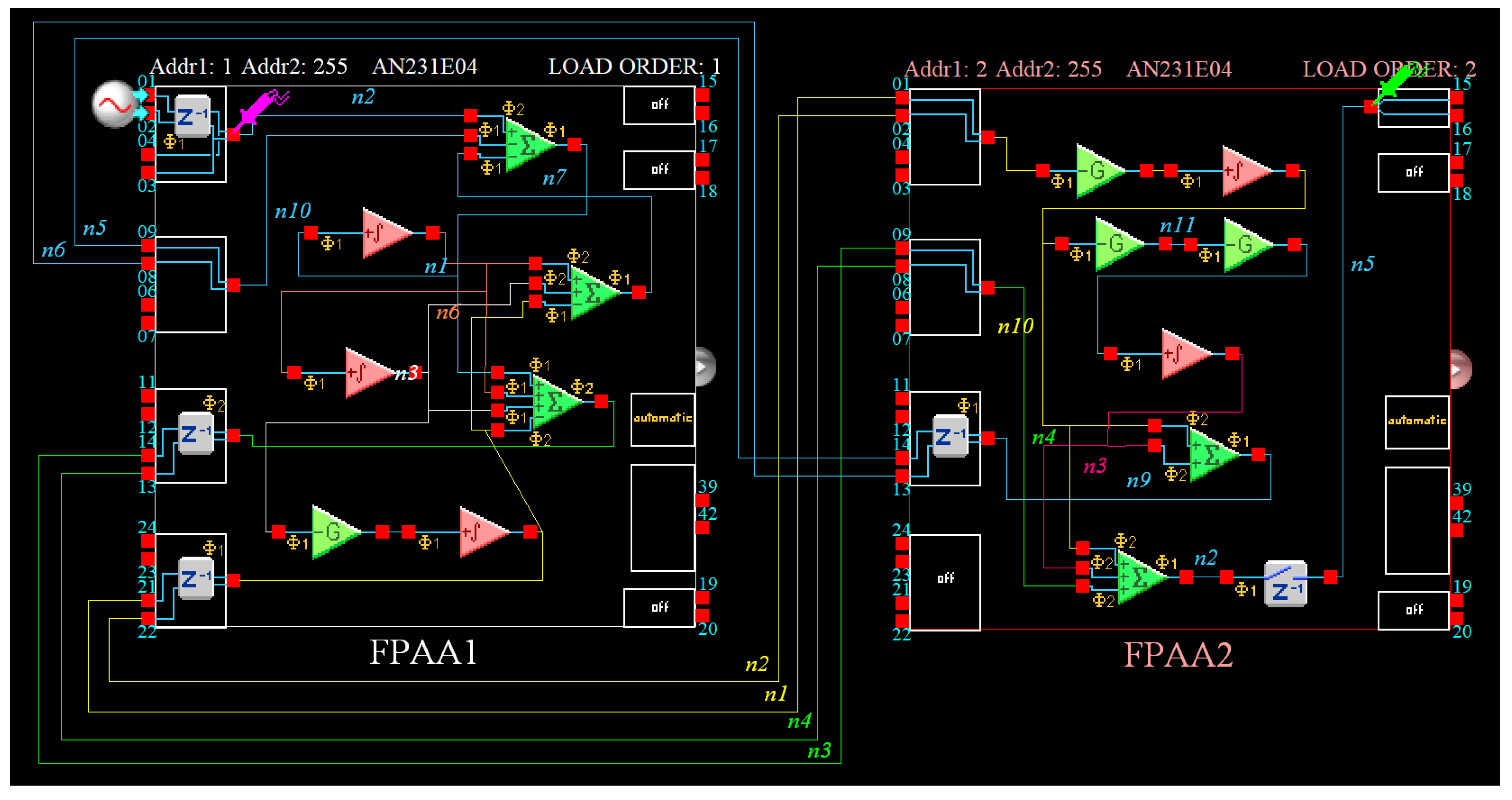
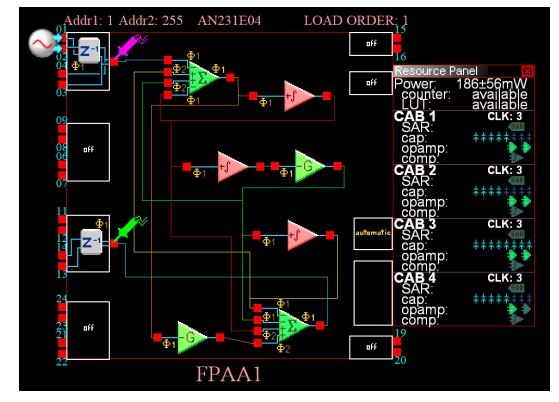
FPAA-based realization of filters with fractional laplace operators of different orders
A simple and direct procedure for implementing fractional-order filters with transfer functions that contain Laplace operators of different fractional orders is presented in this work. Based on a general fractional-order transfer function that describes fractional-order low-pass, high-pass, band-pass, band-stop and all-pass filters, the introduced concept deals with the consideration of this