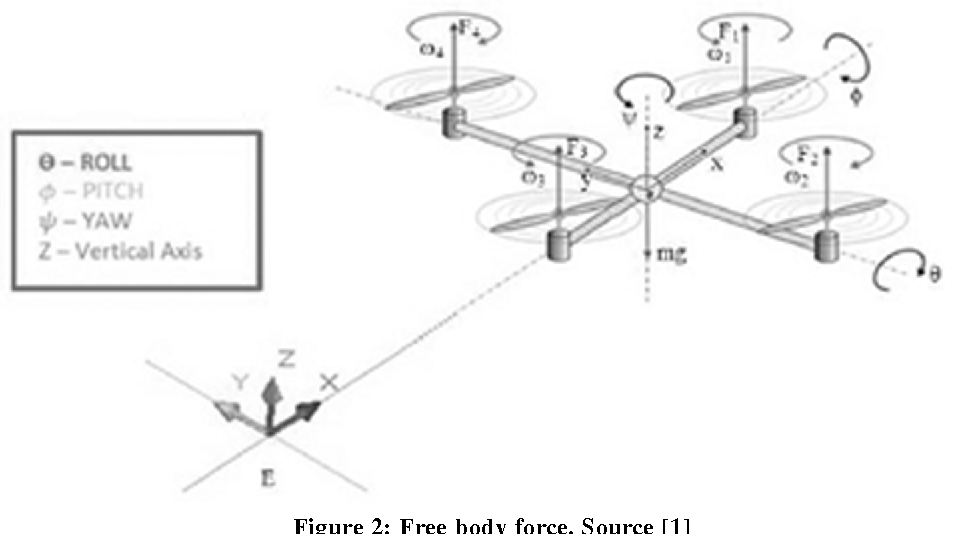
Self Balancing Quad-Copter Using PID Controller
Unmanned Aerial Vehicle (UAV) technology is considered one of the important technologies at present, which is believed to solve many problems in the future, such as delivering small-weighted goods, agriculture, and civil fields. This research paper presents the mathematical model of a quadcopter that was developed as an example of an unmanned aerial vehicle. The MATLAB and Simulink environment create the model simulation and controller design. The present study proposes a cost-effective and easily deployable control system with a comparison that shows the difference between the controller made in this paper and the literature. The mathematical model represented has been linearized, and the transfer function of the brushless DC motors responsible for quadcopter motion is derived using system identification techniques to construct the attitude controller. The controller is evaluated, and the simulation results are described. It presents the design and development of a remote-controlled quadcopter utilizing a PID (Proportional Integral Derivative) cost-effective controller implemented using an Arduino UNO board. © 2022 IEEE.
Related Publications
Hands-on analysis of using large language models for the auto evaluation of programming assignments